
Arduino ESP32 STM32 guides
The best channel about electronics!
Show more259
Subscribers
No data24 hours
No data7 days
No data30 days
- Subscribers
- Post coverage
- ER - engagement ratio
Data loading in progress...
Subscriber growth rate
Data loading in progress...
Repost from Embedded Systems
👋 Stanford Doggo - an Open-Source quadruped robot
Stanford Doggo is a cost-effective, four-legged robot developed by Stanford students from the Extreme Mobility team. It is designed for traversing challenging terrain, performing acrobatic tricks, and encouraging an open-source community by providing comprehensive plans and code online.
Features of the robot:
➡️ Holds the record for the highest vertical jumping agility among all robots.
➡️ Estimated cost of less than $3,000, making it a cost-effective alternative.
➡️ Capable of walking, trotting, dancing, and performing impressive jumps and backflips.
➡️ Comprehensive plans, code, and supply list freely available online, fostering a collaborative community.
➡️ Motors recalculate at a remarkable 8,000 times per second, contributing to the robot's agility.
With open-access plans and code, Stanford Doggo beckons tech enthusiasts and researchers to explore its intricacies, offering a hands-on opportunity to contribute to the ever-evolving landscape of robotic locomotion.
More information:
🔗 The main article
😹 The GitHub page
#projects #robots
Repost from Embedded Systems
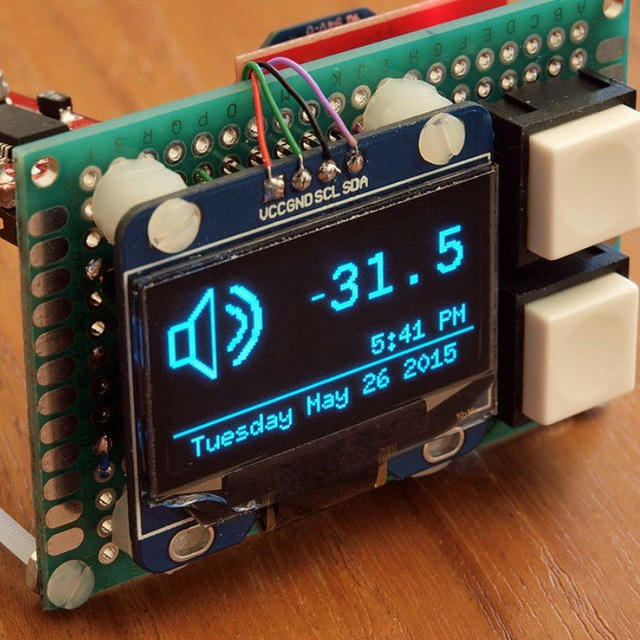
📱 3D-Printable Smart Digital Scale with ESP8266
This project is a user-friendly guide for constructing a precise digital scale capable of measuring weights in the gram spectrum using an ESP-12S microcontroller, a load cell, and an HX711 Wheatstone bridge to I2C converter. The inclusion of an ESP8266 with Wi-Fi capabilities allows for potential future data transmission to the cloud.
Features of the scales:
➡️ ESP8266 microcontroller with Wi-Fi capabilities.
➡️ OLED 1.3" I2C display for clear weight readings.
➡️ Load cell (e.g., 5kg) with HX711 ADC for precise measurements.
➡️ 3D printing option for customizable case.
➡️ Calibration functionality for accurate weight readings.
➡️ Possibility to modify code for additional functionalities like counting objects or calculating liquid volume.
This project is intriguing due to its combination of hardware and software elements, providing users with a hands-on experience in building a functional IoT device.
⛓ More information...
#projects #esp32 #arduino
Repost from Embedded Systems
🤖 NASA-JPL Open Source Rover: off-the-shelf edition
The JPL Open Source Rover is an open source, build it yourself, scaled down version of the 6 wheel rover design that JPL uses to explore the surface of Mars. The Open Source Rover is designed entirely out of consumer off the shelf parts.
The robot has the following features:
▫️ Rocker-Bogie: The Rocker-Bogie suspension system allows all 6 wheels to continually be in contact with the ground while climbing over obstacles
▫️ Differential Pivot: Allows weight to be mechanically offloaded from one side of the rover to the other while climbing
▫️ 6-Wheel Ackerman Steering: Driving and steering/turning mechanism that governs where the wheels point and how fast each of them will move.
This project is intended to be a teaching and learning experience for those who want to get involved in mechanical engineering, software, electronics, robotics but is also an excellent research platform for rugged terrain.
More information...
#projects #robots